SLAM & Autonomous Nav

Project Overview
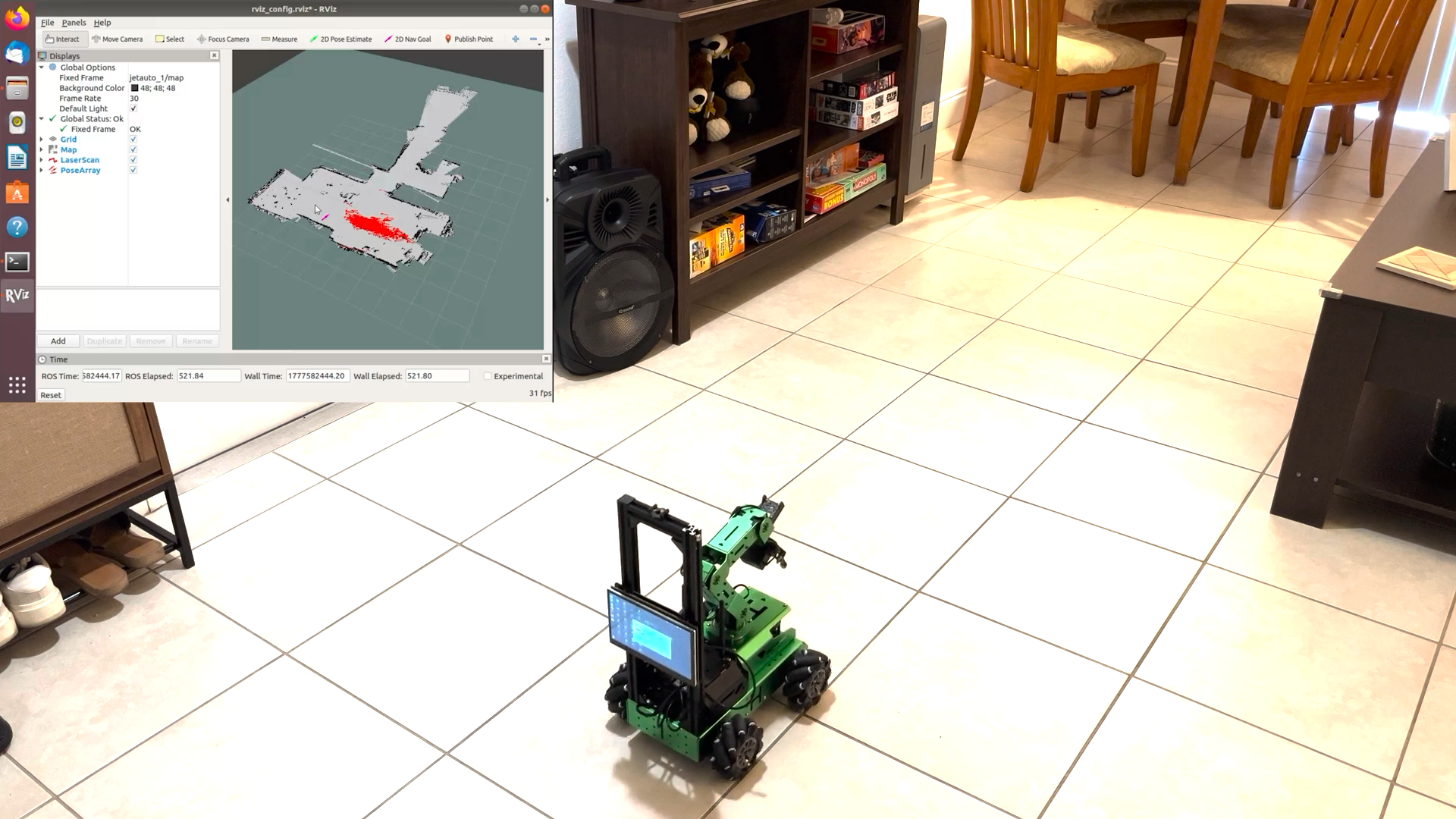
The SLAM & Autonomous Navigation project is actually a project that starts in an intelligent autonomous robotics class and should serve as a baseline for later experiments. In a few words, it is about implementing a simple SLAM system using a 2D LiDAR on a Hiwonder JetAuto Pro bot to enable autonomous navigation.
This page is currently a work in progress. I will publish more information about the implementation details, challenges & solutions, and future work soon. Meanwhile, feel free to explore the existing resources below.
Media & Resources
Here is a video presentation for the term project in the Intelligent Autonomous Robots class (CDA 5626) at Florida Atlantic University. The professor was Dr. Minghan Wei.
Find other documents and related resources for the project here:
- GitHub repository containing unpolished notes compiled during the project development: https://github.com/RARM/robotics-autolidar-hiwonder.
- Intelligent Autonomous Robots Class
- Original term project proposal: Rodolfo’s Project Proposal.
- Final presentation slides: Rodolfo’s Term Project Presentation.
- Final Report: Coming Soon.
- Dr. Raviv and Dr. Yepes’ paper: https://arxiv.org/abs/2603.05686.